
- 2021/04/05
- CASE, JAMAGAZINE, 自動運転

【 #JAMAgazine 】#自動運転 の開発は競争と協調で
JAMAGAZINE 2021年4月号より記事ピックアップ。
日本自動車工業会・自動運転部会 部会長
(ホンダ四輪事業本部電子制御開発統括部 電子制御開発企画管理部 エグゼクティブチーフエンジニア)
横山 利夫 インタビュー
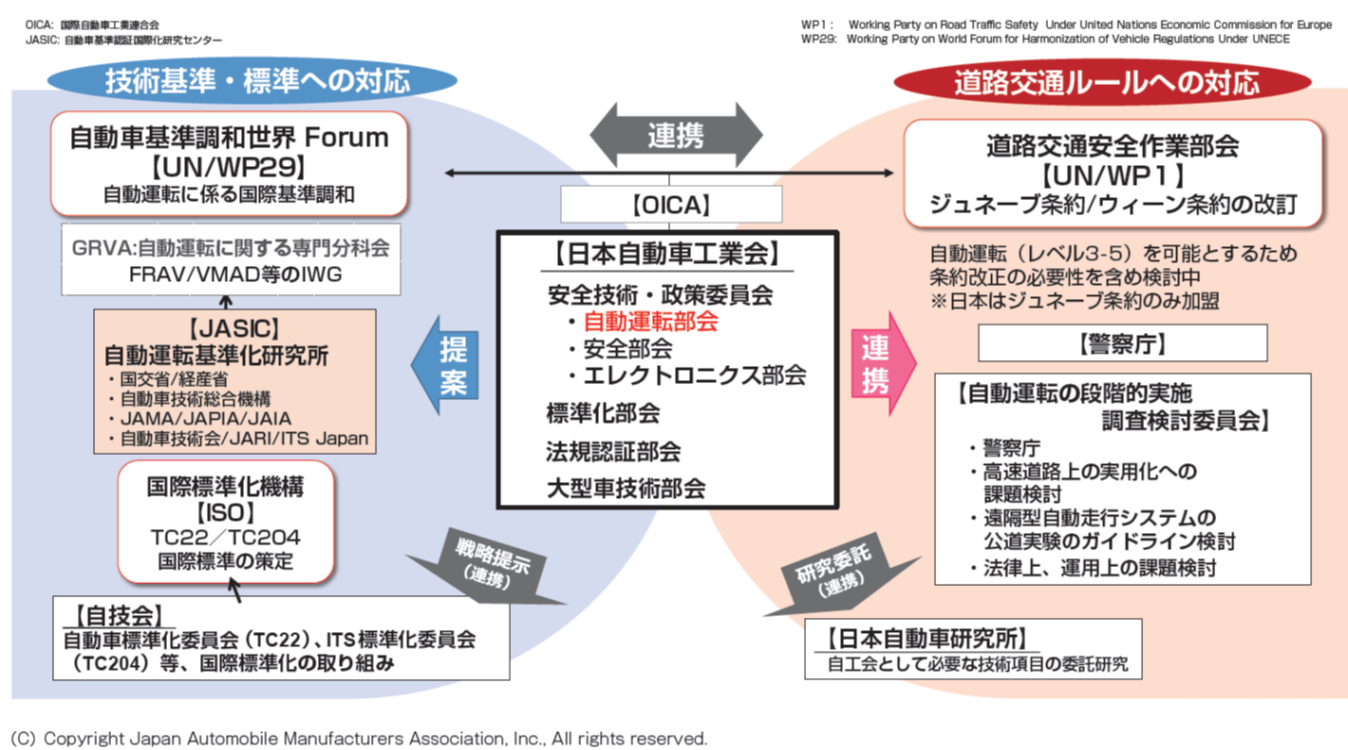
自動運転「レベル3」(限定領域での条件付自動運転車)を実現した量産車が国内でいよいよ発売されました。レベル3の型式指定を量産車が取得したのは世界初となります。日本は、国連自動車基準調和世界フォーラム(WP29)において自動運行装置の国際基準について主導し、自動運転レベル3における高速道路上で時速60キロメートル以下の渋滞時の車線維持機能やサイバーセキュリティーなどで国際基準づくりに携わりました。日本自動車工業会では自動運転技術開発にかかる各社の競争領域と協調領域を明確化し、国際的な自動運転技術基準や標準化への対応にむけて提案や連携を図ってきました。自工会自動運転部会の横山利夫部会長にこれまでの取り組みや今後の展望について聞きました。

―自動運転を巡る自工会のこれまでの取り組みについて
「自動運転が盛り上がったのは諸説あると思いますが、2012年にグーグルが 『セルフ ・ ドライビング ・ カー』 というコンセプトを大々的にPRしたのがきっかけだと思います。 日本においては翌年の 『ITS世界会議東京』 で、 各社が自動運転に関連したデモンストレーシ ョ ンを行いました。 こうした中、 自工会では自動運転に関わるさまざまな協調領域において、 一カ所の窓口で対応していく必要があるんじゃないかという話になり、14年7月に 『自動運転検討会』 という新たな会を立ち上げました。まずは自工会で共通のビジョンを作ろうと、 その結果を15年の東京モーターショーで発表しました。」
―レベル3の実現にあたっては自工会の枠組みでどのような役割を担いましたか
「自動運転システムの実用化に向けては、 やるべきことが広範囲にあります。 個社でバラバラにやっていては全部をカバーすることは厳しいということもあり、 まずは『競争領域』 と 『協調領域』 を区別し、 協調領域についてはなるべく自工会中心で対応していこうということになりました。 自工会で対応すべき協調領域で一番大きいのはレギュレーションです。 自動運転を実用化するためには当然、 安全基準に適合させていかなくてはいけません。 そのために協調領域として準備しなければならない様々な領域にたいして、 『ユースケース』 や『ヒューマンファクター』 といった6つのワーキンググループ (WG) を順次立ち上げました。 6つのワーキンググループは現在、 分科会となっておりますが、 各会の検討結果を自動運転実現に必要な基準や標準、 道路交通法改正の場に自工会の意見として発信してきました」
―ユースケースとは
「自動運転関連の分科会で一番歴史が古いのはユースケースです。 (自動運転シーンを具体的に記述する) ユースケースがないと、 自動運転がどのようにふるまえば妥当なのか具体的な方向性が見いだせないので、 まずはユースケースを網羅的に体系化していこうとなりました」
―ユースケースを各社が自動運転開発に利用することもありますか
「当然そうです。 運行設計領域 (ODD) を定めるときにどういったユースケースに対応しないといけないのか、 そういったところの基礎データとして使えます。 ユースケースは22年くらいまでにだいたい網羅できるようになりますので、 自動運転技術の開発効率も引きあがります。そうすれば、 検討材料は同じわけですから各社の自動運転車のレベルがある程度のところでそろうことになり、 でこぼこな状態ではなくてある一定以上の自動運転車を自工会の会員各社が出せるようになります。 これはすごく重要なことです。 ただ、 これはあくまで日本国内のケースなので、 クルマはグローバルな商品だと考えますと海外のユースケースはどうする、 というのは考えていかないといけません」

―ヒ ューマンファクター分科会ではレベ ル3実現に重要な運転交代要求について研究してきました
「システムが運転交代要求を出した後、 ドライバーは何秒後に運転を交代してくれるか、 それがポイントになりました。 最終的にはWP29で10秒程度ということに決まりましたが、 『運転を交代して下さい』 とシステムに言われれば、 ふつうは数秒でやるものです。 ただ、 この辺りはいろいろな考え方があって、 (レベル3の型式認定を取得した)ホンダ 『レジェンド』 の例でいいますと、 運転交代要求を出して、4秒ぐらいたっても万が一ドライバーが応えなか った場合、 音声のレベルを上げて最後はシートベルトを引き込むことで確実に交代要求を伝えるようにしています。 それでも運転交代できない場合は心臓発作などを起こした可能性がありますので、 ミニマル ・ リスク ・ マヌーバー (MRM)でなるべく安全な状態で速やかにクル マを停止します。 」
―今回の自動運転は渋滞時のみですが、 より高速域での実用化の見通しは
「現状の 『トラフィ ック ・ ジャム・パイロット』 からシステムを 『ハイウェイ ・ ショーファー』 に拡張するためにはレギュレーション対応が一番重要になります。 これまで低速域で決めてきたものが、 高速域でも問題ないか検証をやっていかなければなりません。 ハイウェイ ・ ショーファーではレーンチェンジの機能も入ってきますので、 そのシナリオを追加で準備しないといけないとか、 データ記録装置もどのようなデータがそもそも必要かといったことも検証しないといけません」

―より高度な自動運転の実現に向け他業種との連携はどのように広がりますか
「具体的な例はまだ申し上げられないですが、 無線通信インフラを活用したり、 無線通信経由で入ってくる情報を活用するとかを考えますと、 これは自動車産業だけでクローズできるものではないでしょう。 当然、 通信業界などいろんな情報ソースと連携していかないといけません。 次世代モビリティ委員会のコネクテッド部会などで異業種との連携をやっていくという話になるでしょう。 WP29でいま言われているのは自動運転車が市場に出た後もモニタリングをやるべきという議論が始まっていまして、 そうなるとクルマがお客様に渡った後も情報のやり取りができる仕組みが必須になってきます。 電動化においてもバ ッテリーのコンディションや充電ポイントの情報などユーザーに伝えないといけない情報は従来の内燃機関とは大きく異なってきます」
PROFILE
横山利夫氏
専門領域: 電気・電子工学、自動車工学
経歴: 1979~本田技研工業(株)入社、 (株)本田技術研究所に配属後、自動車用電子燃料
噴射システム(EFI)の研究開発に従事。2000~Honda R&D Americas Vice President
2003~Honda Research Institute USA Presidentとしてコンピュータサイエンスの研究を担当。2005~ (株)本田技術研究所 栃木研究所 上席研究員としてICT/ITS 領域の研究開発を担当。2008~未来交通システム研究室 室長、Compact City/Smart Cityの研究を担当。2012~ (株)本田技術研究所 四輪R&Dセンター上席研究員としてITS/自動運転の研究開発を担当。2014~日本自動車工業会 自動運転検討会
主査。2020~現在の所属および肩書に変更、業務内容は従来通り。2020~日本自動車工業会組
織変更に伴い、自動運転部会 部会長。